3D graphic functions
rotateAroundAxis
rotateAroundAxis(angle:float, axis:vector3D)
rotateAroundAxis(angle:float, axis:vector3D)
In more complex application it is basically impossible to rotate around a specific rotation axis using only rotate3D(). For this reason the rotateAroundAxis() function was implemented.
This function will rotate the current frame along a user specified axis (3D vector) by a given angle (in rad).
It also works in either LOCAL or GLOBAL mode based on the current set rotationMode().
axis = vector3D(x=1,y=2,z=0.5)
rotateAroundAxis(PI/4, axis)
setWorldRotation3D
setWorldRotation3D(rotation:rotation3D)
For more elaborate 3D applications, it is helpful to be able to write & read the current world rotation.
This functions writes a previously read world rotation.
rotation:rotation3D
rotation = getWorldRotation3D()
setWorldRotation3D(rotation)
getWorldRotation3D
getWorldRotation3D()->rotation3D
For more elaborate 3D applications, it is helpful to be able to write & read the current world rotation.
This functions returns a rotation3D object/class (by reference).
rotation:rotation3D
rotation = getWorldRotation3D()
rotationMode
rotationMode(mode:byte)
Sometimes it’s easier to think in the world frame (especially when dealing with consecutive rotations).
You can set the rotation’s reference frame to LOCAL (default) or GLOBAL.
rotationMode(LOCAL)
rotationMode(GLOBAL)
translationMode
translationMode(mode:byte)
Sometimes it’s easier to think in the world frame (especially when dealing with consecutive rotations).
You can set the translation’s reference frame to LOCAL (default) or GLOBAL.
translationMode(LOCAL)
translationMode(GLOBAL)
render
render()
All 3D shapes are drawn on top of 2D elements. This is because of the automatic call of render() within the update() function.
If you would like to draw 2D elements on top of 3D shapes, you can call render() manually after the drawing of 3D shapes.
fill(230, 204, 57)
background(162, 9, 176)
textFont(FONT_ROBOTO_BOLD_64)
drawSphere(3)
stroke(0, 0, 0)
drawText(26, 90, "Sphere") # this black text will be behind the sphere
render()
stroke(255, 255, 255)
drawText(20, 80, "Sphere") # this white text will be in front of the sphere
update()
addVertex3D
addVertex3D(x:float, y:float, z:float)
This function adds a point at location x/y/z in a polygon definition.
Example: see beingShape3D()
endShape3D
endShape3D()
This function closes a polygon definition.
When endShape3D() is called, the polygon is drawn into the screen buffer.
Example: see beginShape3D()
beginShape3D
beginShape3D()
Starts a polygon definition. This consists of a beginShape3D(), several calls to addVertex3D() and a termination with endShape3D().
Example:
const l = 1.06 # 0.1 .. 2.0
fill(255,255,255)
def onDraw():
clear()
rotateY(0.02)
beginShape3D() # face 1
addVertex3D(l, l, l)
addVertex3D(-l, l, -l)
addVertex3D(-l, -l, l) # face 2
addVertex3D(l, l, l)
addVertex3D(-l, -l, l)
addVertex3D(l, -l, -l) # face 3
addVertex3D(-l, -l, l)
addVertex3D(-l, l, -l)
addVertex3D(l, -l, -l) # face 4
addVertex3D(-l, l, -l)
addVertex3D(l, l, l)
addVertex3D(l,-l, -l)
endShape3D()
update()
This example draws a simple tetrahedron with four faces rotating in space.
drawShape3D
drawShape3D(vertices:float[], triangles:int[])
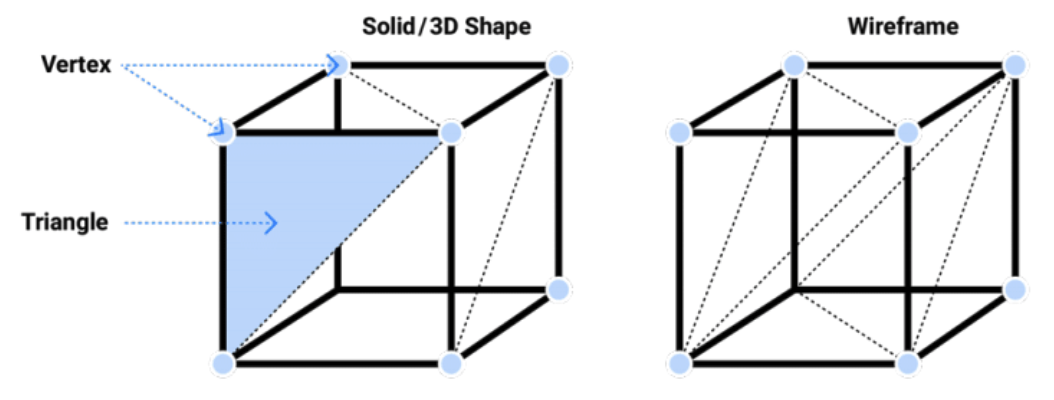
You can create and render custom 3D shapes using the drawShape3D() function.
Every shape consists of a list of vertices (locations in the 3D space) and a list of triangles/faces between those vertices.
Example:
verts:float[30] = [
-1,-1,-1,
1,-1,-1,
1,1,-1,
-1,1,-1,
-1,-1,1,
1,-1,1,
1,1,1,
-1,1,1,
0,-1,2,
0,1,2
]
tris:int[48] = [
0,1,4,
1,5,4,
1,2,5,
2,6,5,
2,3,6,
3,7,6,
3,0,7,
0,4,7,
0,3,2,
0,2,1,
4,5,8,
6,7,9,
5,6,8,
7,4,9,
4,8,9,
6,9,8
]
fill(255,255,255)
rotateX(-PI_DIV2)
scaleZ(0.8)
def onDraw():
clear()
rotateZ(0.02)
drawOrigin()
drawShape3D(verts, tris)
update()
rotateCameraZ
rotateCameraZ(z:float)
Same as rotateCamera3D(x, y, z) but only rotating the camera around the Z axis.
fill(255,255,255)
def onDraw():
clear()
rotateCameraZ(0.1)
drawCube(2)
update()
rotateCameraY
rotateCameraY(y:float)
Same as rotateCamera3D(x, y, z) but only rotating the camera around the Y axis.
fill(255,255,255)
def onDraw():
clear()
rotateCameraY(0.1)
drawCube(2)
update()
rotateCameraX
rotateCameraX(x:float)
Same as rotateCamera3D(x, y, z) but only rotating the camera around the X axis.
fill(255,255,255)
def onDraw():
clear()
rotateCameraX(0.1)
drawCube(2)
update()
rotateCamera3D
rotateCamera3D(x:float, y:float, z:float))
Besides using rotate3D() to rotate the whole frame (world), you can also use this function to rotate the camera.
The function is additive. Each additional call moves the origin relative to the previous position. If you don’t want this, you can use push()/pop(), which will restore the original state.
Unlike 2D objects, translate and rotate functions are the only option to set the position of 3D shapes.
scaleZ
scaleZ(z:float)
Same as scale3D(x, y, z) but only scaling on the Z axis.
fill(255,255,255)
rotateY(PI/2)
def onDraw():
push()
for i in 100:
clear()
scaleZ(0.99)
drawSphere(4)
update()
pop()
scaleY
scaleY(y:float)
Same as scale3D(x, y, z) but only scaling on the Y axis.
fill(255,255,255)
def onDraw():
push()
for i in 100:
clear()
scaleY(0.99)
drawSphere(4)
update()
pop()
scaleX
scaleX(x:float)
Same as scale3D(x, y, z) but only scaling on the X axis.
fill(255,255,255)
def onDraw():
push()
for i in 100:
clear()
scaleX(0.99)
drawSphere(4)
update()
pop()
scale3D
scale3D(x:float, y:float, z:float)
Scales all subsequent drawing commands by the specified value. For example, the size doubles with the value 2 or halves with 0.5.
Note: scale3D() is multiplicative. This means that, for example, scale3D(2) and scale3D(1.5) together achieve the same effect as a single scale3D(3).
Example:
fill(255,255,255)
drawSphere(1)
update()
delay(1000)
scale3D(2,2,2)
drawSphere(1)
update()
delay(1000)
scale3D(1.5,1.5,1.5)
drawSphere(1)
update()
translateCameraZ
translateCameraZ(z:float)
Same as translateCamera3D(x, y, z) but only translating the Z axis of the camera.
fill(255,255,255)
translateCameraZ(-5)
def onDraw():
for i in 100:
clear()
translateCameraZ(0.1)
drawCube(2)
update()
translateCameraZ(-10)
translateCameraY
translateCameraY(y:float)
Same as translateCamera3D(x, y, z) but only translating the Y axis of the camera.
fill(255,255,255)
translateCameraY(-5)
def onDraw():
for i in 100:
clear()
translateCameraY(0.1)
drawCube(2)
update()
translateCameraY(-10)
translateCameraX
translateCameraX(x:float)
Same as translateCamera3D(x, y, z) but only translating the X axis of the camera.
fill(255,255,255)
translateCameraX(-5)
def onDraw():
for i in 100:
clear()
translateCameraX(0.1)
drawCube(2)
update()
translateCameraX(-10)
translateCamera3D
translateCamera3D(x:float, y:float, z:float)
Besides using translate3D() to move the whole frame (world), you can also use this function to move the position of the camera.
The function is additive. Each additional call moves the origin relative to the previous position. If you don’t want this, you can use push()/pop(), which will restore the original state.
Unlike 2D objects, translate and rotate functions are the only option to set the position of 3D shapes.
rotateZ
rotateZ(z:float)
Same as rotate3D(x, y, z) but only rotating around the Z axis.
fill(255,255,255)
def onDraw():
clear()
rotateZ(0.1)
drawCube(2)
update()
rotateY
rotateY(y:float)
Same as rotate3D(x, y, z) but only rotating around the Y axis.
fill(255,255,255)
def onDraw():
clear()
rotateY(0.1)
drawCube(2)
update()
rotateX
rotateX(x:float)
Same as rotate3D(x, y, z) but only rotating around the X axis.
fill(255,255,255)
def onDraw():
clear()
rotateX(0.1)
drawCube(2)
update()
rotate3D
rotate3D(x:float, y:float, z:float)
Use this function to rotate the current frame (world) around the origin point.
The function is additive. Each additional call moves the origin relative to the previous position. If you don’t want this, you can use push()/pop(), which will restore the original state.
Unlike 2D objects, translate and rotate functions are the only option to set the position of 3D shapes.
translateZ
translateZ(z:float)
Same as translate3D(x, y, z) but only translating the Z axis.
fill(255,255,255)
translateZ(-5)
def onDraw():
for i in 100:
clear()
translateZ(0.1)
drawCube(2)
update()
translateZ(-10)
translateY
translateY(y:float)
Same as translate3D(x, y, z) but only translating the Y axis.
fill(255,255,255)
translateY(-5)
def onDraw():
for i in 100:
clear()
translateY(0.1)
drawCube(2)
update()
translateY(-10)
translateX
translateX(x:float)
Same as translate3D(x, y, z) but only translating the X axis.
fill(255,255,255)
translateX(-5)
def onDraw():
for i in 100:
clear()
translateX(0.1)
drawCube(2)
update()
translateX(-10)
translate3D
translate3D(x:float, y:float, z:float)
Use this function to move the current frame (world).
The function is additive. Each additional call moves the origin relative to the previous position. If you don’t want this, you can use push()/pop(), which will restore the original state.
Unlike 2D objects, translate and rotate functions are the only option to set the position of 3D shapes.
drawTriangularPrism
drawTriangularPrism(r:float, h:float)
Draws 3D shape: Triangular Prism
fill(255,255,255)
rotate3D(-PI/4, -PI/4, 0)
drawTriangularPrism(2, 3)
update()
drawCylinder
drawCylinder(r:float, h:float)
Draws 3D shape: Cylinder
fill(255,255,255)
rotate3D(-PI/4, -PI/4, 0)
drawCylinder(2, 3)
update()
drawCuboid
drawCuboid(w:float, l:float, h:float)
Draws 3D shape: Cuboid
fill(255,255,255)
rotate3D(0, PI/4, 0)
drawCuboid(3, 2, 1)
update()
drawSphere
drawSphere(size:float)
Draws 3D shape: Sphere
fill(255,255,255)
drawSphere(2)
update()
drawCube
drawCube(size:float)
Draws 3D shape: Cube
fill(255,255,255)
rotate3D(0,PI/4,0)
drawCube(2)
update()
drawOrigin
drawOrigin()
This function draws a coordinate frame where each axis has a length of 1 meter/unit.
By convention x is red, y is green, and z is blue.
Use for example translate3D() or rotate3D() to change the position of the origin.